
よく話題になっている単語
動画数:2443件

Information Session: Leading People, Culture, and Innovation Program
Ready to level up your leadership skills? Check out our new Leading People, Culture, and Innovation Program: https://online.stanford.edu/programs/leading-people-culture-and-innovation-program
Led by Assistant Director of Creativity and Innovation Programs, Robyn Woodman, this session provides an engaging dive into the core curriculum and unique benefits of the program.
Whether you're a seasoned executive looking to enhance your leadership prowess or an aspiring leader eager to ignite innovation, this session is perfect for individuals passionate about driving positive change within their teams and organizations.
Chapters
00:17 Logistics
02:16 Program Certificate
02:40 Courses
04:45 Faculty
07:25 Enrollment Options
10:00 Course Record of Completion
11:32 Who is this program for?
20:45 Q&A
25:48 Group Enrollment Discount
26:00 Q&A
#webinar #leadership #onlineclasses
#Stanford #Stanford Online
2024年04月25日
00:00:00 - 00:28:02

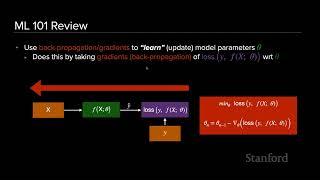
Stanford CS25: V4 I Overview of Transformers
April 4, 2024
Steven Feng, Stanford University [https://styfeng.github.io/]
Div Garg, Stanford University [https://divyanshgarg.com/]
Emily Bunnapradist, Stanford University [https://www.linkedin.com/in/ebunnapradist/]
Seonghee Lee, Stanford University [https://shljessie.github.io/]
Brief intro and overview of the history of NLP, Transformers and how they work, and their impact. Discussion about recent trends, breakthroughs, applications, and remaining challenges/weaknesses. Also discussion about AI agents. Slides here: https://docs.google.com/presentation/d/1oXPs3LXtIVIsVbwTyGjAWj_aWvak9c1uNC4uhkS6glk/edit?usp=sharing
More about the course can be found here: https://web.stanford.edu/class/cs25/
View the entire CS25 Transformers United playlist: https://www.youtube.com/playlist?list=PLoROMvodv4rNiJRchCzutFw5ItR_Z27CM
#Stanford #Stanford Online
2024年04月24日
00:00:00 - 01:17:29

Stanford Seminar - Towards Safe and Efficient Learning in the Physical World
April 5, 2024
Andreas Krause of ETH Zurich
How can we enable agents to efficiently and safely learn online, from interaction with the real world? I will first present safe Bayesian optimization, where we quantify uncertainty in the unknown objective and constraints, and, under some regularity conditions, can guarantee both safety and convergence to a natural notion of reachable optimum. I will then consider Bayesian model-based deep reinforcement learning, where we use the epistemic uncertainty in the world model to guide exploration while ensuring safety. Lastly I will discuss how we can meta-learn flexible probabilistic models from related tasks and simulations, and demonstrate our approaches on real-world applications, such as robotics tasks and tuning the SwissFEL Free Electron Laser.
About the speaker: https://inf.ethz.ch/people/person-detail.krause.html
More about the course can be found here: https://stanfordasl.github.io/robotics_seminar/
View the entire AA289 Stanford Robotics and Autonomous Systems Seminar playlist: https://www.youtube.com/playlist?list=PLoROMvodv4rMeercb-kvGLUrOq4HR6BZD
► Check out the entire catalog of courses and programs available through Stanford Online: https://online.stanford.edu/explore
#Stanford #Stanford Online
2024年04月20日
00:00:00 - 00:45:33

Stanford EE274: Data Compression I 2023 I Lecture 18 - Video Compression
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:08:39
Stanford EE274: Data Compression I 2023 I Lecture 8 - Beyond IID distributions: Conditional entropy
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:16:25

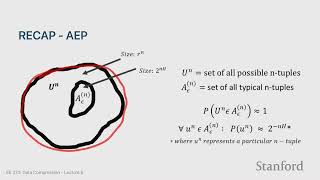
Stanford EE274: Data Compression I 2023 I Lecture 5 - Asymptotic Equipartition Property
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:20:03
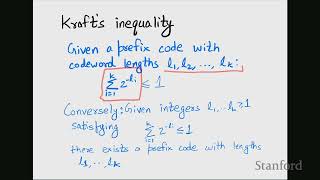
Stanford EE274: Data Compression I 2023 I Lecture 3 - Kraft Inequality, Entropy, Introduction to SCL
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:17:02

Stanford EE274: Data Compression I 2023 I Lecture 11 - Lossy Compression Basics; Quantization
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:24:27
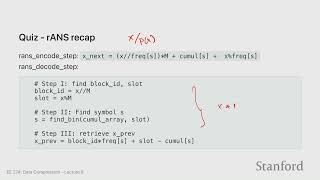
Stanford EE274: Data Compression I 2023 I Lecture 6 - Arithmetic Coding
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:17:34
Stanford EE274: Data Compression I 2023 I Lecture 16 - Learnt Image Compression
To follow along with the course, visit the course website:
https://stanforddatacompressionclass.github.io/Fall23/
Tsachy Weissman
Professor of Electrical Engineering at Stanford University
https://web.stanford.edu/~tsachy/
Shubham Chandak
https://shubhamchandak94.github.io/
Pulkit Tandon
Learn more about the online course and how to enroll: https://online.stanford.edu/courses/ee274-data-compression-theory-and-applications
To view all online courses and programs offered by Stanford, visit: http://online.stanford.edu
#Stanford #Stanford Online
2024年04月19日
00:00:00 - 01:21:18